







據IEEE Spectrum網站消息,幾乎所有的哺乳動物都利用胡須作探測器,以提高自己的觸覺。受此啟發,英國謝菲爾德大學的科學家研發了一種仿生的“胡須”探測機器人,幫助Bellabot仿生機器人來感知周圍的環境。
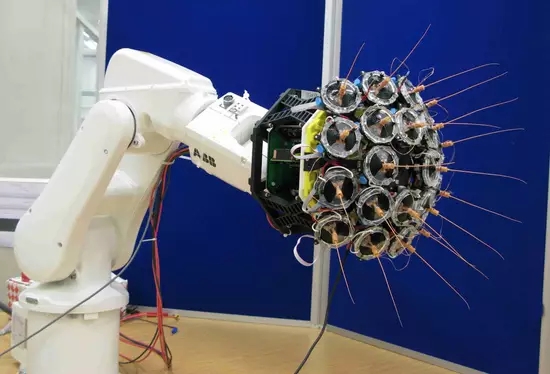
這個機器人平臺叫做Bellabot,它集成了大量由電活性聚合物“肌肉”驅動的仿生“胡須”傳感器,一個標準的工業機器臂允許這個機器人可以進行移動,還有一個攝像頭為機器人提供視覺誤差反饋。當機器人感知到一個物體時,這個機器人會后退并尋找不同的路徑。 論文摘要中寫道:“這種算法能學習接受由于制造公差或者傳感器陣列受損所造成的感官陣列的不足之處,這種能力對在真實世界中長時間操作穩健的觸覺機器人系統是一個先決條件。在演示中,傳感器陣列被故意的歪曲,以評估算法的表現。”
點評:有密集恐懼癥的人估計受不了這種視覺沖擊,不過這也算是一種嘗試和創新,將進一步提升工業機器人的感知能力,目前人機協作的嘗試已經將觸覺列為機器人安全因素的首要考慮,但是小編也有種疑慮,這得需要多少個傳感器啊!機器人的成本又得漲一半!


